Kuboresha utendaji na MPU-6050: Usanidi, hesabu, na matumizi
2024-04-25
9267
MPU-6050 ni sehemu ya kwanza ya usindikaji wa mwendo wa 6-axis, ambayo inajumuisha gyroscope 3-axis, kasi ya 3-axis na processor ya mwendo wa dijiti (DMP).Kusudi la kuitumia ni kupata pembe ya kitu cha kupimwa (kama vile quadcopter, gari la kusawazisha) kwenye x, y, na z axes, ambayo ni, pembe ya lami, pembe ya roll na angle ya yaw.Tunasoma data sita ya MPU-6050 (thamani ya matangazo ya axis tatu na thamani ya matangazo ya kasi ya axis angular) kupitia interface ya I2C.Baada ya usindikaji wa mkao wa mkao, lami, roll, na pembe za yaw zinaweza kuhesabiwa.Kama kumbukumbu ya mwelekeo kwa maadili ya kipimo, ufafanuzi wa mwelekeo wa kuratibu wa sensor ni kama inavyoonyeshwa kwenye takwimu hapa chini, ambayo inafuata kanuni ya mfumo wa kuratibu wa mkono wa kulia (ambayo ni, kidole cha kulia kinaelekeza mwelekeo mzuri wa x-Axis, kidole cha index kinaelekeza mwelekeo mzuri wa y-axis, na kidole cha kati kinaelekeza mwelekeo mzuri wa mwelekeo wa z.
Katalogi

Na basi yake ya sensor ya I2C iliyojitolea, MPU-6050 ina uwezo wa kupokea pembejeo moja kwa moja kutoka kwa dira ya nje ya 3-axis, kutoa matokeo kamili ya 9-axis MotionFusion ™.Huondoa shida ya kutofautisha kati ya ratiba ya pamoja ya gyroscope na accelerator na kwa kiasi kikubwa hupunguza nafasi ya ufungaji ikilinganishwa na suluhisho za sehemu nyingi.Wakati imeunganishwa na sumaku ya axis tatu, MPU-60X0 ina uwezo wa kutoa matokeo kamili ya mhimili wa 9-axis kwa bandari yake kuu ya I2C au SPI (kumbuka kuwa bandari ya SPI inapatikana tu kwenye MPU-6000).
Njia mbadala na sawa
- MPU-3300
- MPU-6000
- MPU-6500
Mtengenezaji wa MPU-6050
Mtengenezaji wa MPU-6050 ni TDK.Baada ya waanzilishi wawili wa TDK, Dk. Yogoro Kato na Takei Takei, waligundua Ferrite huko Tokyo, walianzisha Tokyo Denkikagaku Kogyo K.K.Mnamo mwaka wa 1935. Kama chapa ya tasnia ya umeme ya kimataifa, TDK daima imehifadhi nafasi kubwa katika nyanja za malighafi ya elektroniki na vifaa vya elektroniki.Jalada la jumla la bidhaa linalotokana na uvumbuzi wa TDK linashughulikia vifaa vya kupita kiasi kama vile capacitors za kauri, capacitors za elektroni za aluminium, capacitors za filamu, bidhaa za sumaku, vifaa vya frequency ya juu, vifaa vya piezoelectric na kinga, pamoja na sensorer na mifumo ya sensor (kama vile joto na shinikizo,Sensorer za Magnetic na MEMS), nk Kwa kuongeza, TDK pia hutoa vifaa vya nguvu na vifaa vya nishati, vichwa vya sumaku na bidhaa zingine.Bidhaa zake ni pamoja na TDK, EPCOS, Invensense, Micronas, Tronics na TDK-LAMBDA.
Mchoro wa ndani wa MPU-6050
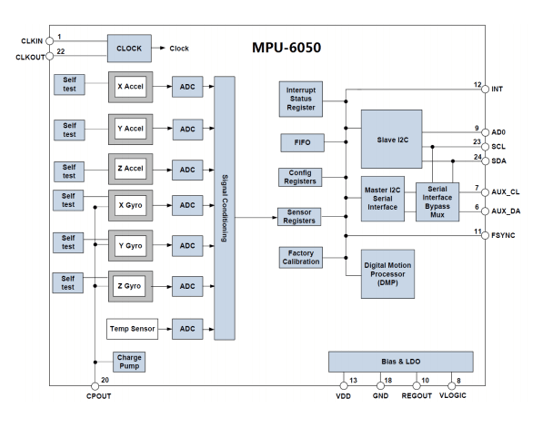
Kati yao, SCL na SDA ni miingiliano ya IIC iliyounganishwa na MCU, na MCU inadhibiti MPU-6050 kupitia interface hii ya IIC.Kuna pia interface ya IIC, ambayo ni aux_cl na aux_da.Sura hii inaweza kutumika kuunganisha vifaa vya watumwa wa nje, kama vile sensorer za sumaku, kuunda sensor ya axis tisa.VLOGIC ni voltage ya bandari ya IO.Pini hii inaweza kusaidia kiwango cha chini cha 1.8V.Kawaida tunaiunganisha moja kwa moja na VDD.AD0 ni pini ya kudhibiti anwani ya interface ya mtumwa IIC (iliyounganishwa na MCU).Pini hii inadhibiti chini ya anwani ya IIC.Ikiwa imeunganishwa na GND, anwani ya IIC ya MPU-6050 ni 0x68;Ikiwa imeunganishwa na VDD, ni 0x69.Tafadhali kumbuka kuwa anwani hapa haijumuishi maambukizi ya data ya chini kabisa (kitu cha chini kabisa hutumiwa kuwakilisha shughuli za kusoma na kuandika).Kwenye MWBalancedSTC15, AD0 imeunganishwa na GND, kwa hivyo anwani ya IIC ya MPU-6050 ni 0x68 (ukiondoa kidogo).
Anzisha interface ya IIC
MPU-6050 hutumia IIC kuwasiliana na STC15, kwa hivyo tunahitaji kuanzisha mistari ya data ya SDA na SCL iliyounganishwa na MPU-6050 kwanza.
Rudisha MPU-6050
Hatua hii inarejesha rejista zote ndani ya MPU-6050 kwa maadili yao ya msingi, ambayo hupatikana kwa kuandika 1 hadi Bit7 ya Usajili wa Usimamizi wa Nguvu 1 (0x6b).Baada ya kuweka upya, Usajili wa Usimamizi wa Nguvu 1 utarejeshwa kwa thamani ya msingi (0x40), na rejista hii lazima iweze kuweka 0x00 kuamka MPU-6050 na kuiweka katika hali ya kawaida ya kufanya kazi.
Weka kiwango kamili cha sensor ya velocity ya angular (gyro) na sensor ya kuongeza kasi
Katika hatua hii, tunaweka safu kamili (FSR) ya sensorer mbili kupitia Usajili wa Usanidi wa Gyroscope (0x1b) na Usajili wa Usanidi wa Sensor ya Kuongeza kasi (0x1c) mtawaliwa.Kawaida, tunaweka kiwango kamili cha gyroscope hadi ± 2000dps na kiwango kamili cha kuongeza kasi hadi ± 2G.
Weka vigezo vingine
Hapa, tunahitaji pia kusanidi vigezo vifuatavyo: Zima usumbufu, Lemaza interface ya AUX I2C, Lemaza FIFO, weka kiwango cha sampuli ya gyroscope, na usanidi kichujio cha dijiti cha chini (DLPF).Kwa kuwa hatutumii usumbufu kusoma data katika sura hii, kazi ya kuingiliana inahitaji kuzimwa.Wakati huo huo, kwa kuwa hatutumii interface ya AUX I2C kuunganisha sensorer zingine za nje, tunahitaji pia kufunga interface hii.Kazi hizi zinaweza kudhibitiwa kupitia usajili wa Interrupt Wezesha (0x38) na Usajili wa Udhibiti wa Mtumiaji (0x6a).MPU-6050 inaweza kutumia FIFO kuhifadhi data ya sensor, lakini hatujatumia katika sura hii, kwa hivyo chaneli zote za FIFO zinahitaji kufungwa.Hii inaweza kudhibitiwa kupitia rejista ya FIFO Wezesha (0x23).Kwa msingi, thamani ya rejista hii ni 0 (ambayo ni, FIFO imezimwa), kwa hivyo tunaweza kutumia thamani ya msingi moja kwa moja.Kiwango cha sampuli ya gyroscope inadhibitiwa na usajili wa mgawanyiko wa kiwango cha sampuli (0x19).Kawaida, tunaweka kiwango hiki cha sampuli hadi 50. Usanidi wa kichujio cha kupitisha dijiti (DLPF) umekamilika kupitia rejista ya usanidi (0x1a).Kwa ujumla, tutaweka DLPF kwa nusu ya bandwidth ili kusawazisha usahihi wa data na kasi ya majibu.
Sanidi chanzo cha saa ya mfumo na uwezeshe sensor ya kasi ya angular na sensor ya kuongeza kasi
Mpangilio wa chanzo cha saa ya mfumo inategemea usajili wa usimamizi wa nguvu 1 (0x6b), ambapo vitu vitatu vya chini kabisa vya rejista hii huamua uteuzi wa chanzo cha saa.Kwa msingi, biti hizi tatu zimewekwa kwa 0, ambayo inamaanisha mfumo hutumia oscillator ya 8MHz RC kama chanzo cha saa.Walakini, ili kuboresha usahihi wa saa, mara nyingi tunaiweka 1 na kuchagua X-axis gyroscope PLL kama chanzo cha saa.Kwa kuongezea, kuwezesha sensor ya kasi ya angular na sensor ya kuongeza kasi pia ni hatua muhimu katika mchakato wa uanzishaji.Shughuli zote mbili zinatekelezwa kupitia Usajili wa Usimamizi wa Nguvu 2 (0x6c).Weka tu kidogo hadi 0 ili kuamsha sensor inayolingana.Baada ya kumaliza hatua hapo juu, MPU-6050 inaweza kuingia hali ya kawaida ya kufanya kazi.Rejista hizo ambazo hazijawekwa maalum zitachukua viwango vya msingi vilivyowekwa na mfumo.
Je! MPU-6050 inafanyaje kazi?
Sensor ya Gyro
Sensor imewekwa na gyro ndani, ambayo daima itabaki sambamba na mwelekeo wa awali kwa sababu ya athari ya gyroscopic.Kwa hivyo, tunaweza kuhesabu mwelekeo na pembe ya mzunguko kwa kugundua kupotoka kwa gyro kutoka kwa mwelekeo wa kwanza.
Sensor ya kuongeza kasi
Sensor ya kuongeza kasi ni kifaa ambacho kinaweza kupima kuongeza kasi na inafanya kazi kulingana na kanuni ya athari ya piezoelectric.Wakati wa kuongeza kasi, sensor hupima nguvu ya ndani inayotumika kwenye block ya misa na kisha kuhesabu thamani ya kuongeza kasi kwa kutumia sheria ya pili ya Newton.
Processor ya mwendo wa dijiti (DMP)
DMP ni moduli ya usindikaji wa data kwenye chip ya MPU6050 ambayo ina algorithm ya kuchuja ya Kalman ya kupata data kutoka kwa sensorer ya gyroscope na accelerometer na kusindika quaternions za pato.Kitendaji hiki kinapunguza sana mzigo wa microprocessor ya pembeni na huepuka kuchuja kwa kuchuja na mchakato wa fusion ya data.
Vidokezo:
Quaternions: Quaternions ni idadi rahisi ya juu.Nambari ngumu zinaundwa na nambari halisi pamoja na kitengo cha kufikiria I, ambapo i^2 = -1.
MPU-6050 inatumika wapi?
- Midoli
- Mchezo wa michezo na michezo ya kubahatisha inayoweza kubebeka
- Watawala wa mchezo wa msingi wa mwendo
- Teknolojia ya Blurfree ™ (kwa video/bado picha ya utulivu)
- Teknolojia ya Airsign ™ (kwa usalama/uthibitishaji)
- Utambuzi wa ishara ya InstantEsTure ™ IG ™
- Sensorer zinazoweza kuvaliwa kwa afya, usawa na michezo
- Mchezo uliowezeshwa na Mchezo na Mfumo wa Maombi
- Teknolojia ya MotionCommand ™ (kwa ishara fupi za ishara)
- Huduma za msingi wa eneo, vidokezo vya riba, na hesabu zilizokufa
- Udhibiti wa kijijini wa 3D kwa DTV zilizounganishwa za mtandao na kuweka masanduku ya juu, panya za 3D
- Teknolojia ya TouchAny Mahali ™ (kwa "Hakuna Kugusa" Udhibiti wa Maombi ya UI/Urambazaji)
Kifurushi cha MPU-6050

Jinsi ya kupunguza kelele ya MPU-6050?
Tunaweza kuchukua njia zifuatazo za kupunguza kelele za MPU-6050.
Tumia sensorer zilizo na hesabu
Kurekebisha kasi na gyroscope ya MPU-6050 inaweza kuondoa upendeleo na makosa ya sensorer wenyewe, na hivyo kupunguza athari ya kelele.Mchakato wa calibration kawaida huwa na hatua mbili: calibration tuli na hesabu ya mwendo.
Mchakato wa kuchuja vifaa
Kuongeza capacitors ya vichungi kwenye mstari wa nguvu wa MPU-6050 inaweza kupunguza athari za kelele ya usambazaji wa umeme kwenye sensor.Wakati huo huo, wakati wa mpangilio wa PCB, tunapaswa kujaribu kuweka MPU-6050 mbali na vyanzo vya kuingiliwa, kama vile mistari ya ishara ya kiwango cha juu na vifaa vya nguvu vya juu.
Usindikaji wa kuchuja programu
Baada ya kukusanya data mbichi kutoka MPU-6050, tunaweza kuongeza kiunga cha kuchuja programu kwa mchakato wa awali wa data ya awali ili kuondoa kuingiliwa kwa kelele.Njia za kawaida za kuchuja programu ni pamoja na kuchuja, kuchuja kati, kuchuja kwa Kalman na kadhalika.
Tumia kichujio cha chini cha kupita
MPU-6050 ina kichujio cha ndani cha dijiti cha chini cha dijiti, ambacho kinaweza kutumiwa kupunguza kelele ya frequency ya juu kwa kuweka frequency yake ya cutoff.Hasa, tunaweza kuweka mzunguko wa kichujio cha dijiti kwa kurekebisha usajili wa usanidi wa MPU-6050 ili kuondoa kelele ya mzunguko wa juu unaosababishwa na sampuli ya A/D.
Uhesabuji wa mwendo wa msingi wa MPU-6050
MPU-6050 ni sensoreter ya axis-axis na sensor ya gyroscope ambayo inaweza kutumika kupima mwendo na mtazamo wa vitu.Hesabu ya trajectory ya mwendo kulingana na MPU-6050 inaweza kupatikana kwa hatua zifuatazo:
Hatua ya kwanza ni kusoma data ya sensor.Tunahitaji kusoma data ya kuongeza kasi na gyroscope kutoka kwa sensorer za MPU-6050 kwa kutumia madereva sahihi na kazi za maktaba.Hizi data kawaida ni pato katika muundo wa dijiti, kwa hivyo kazi fulani ya ubadilishaji na hesabu inahitajika ili kuibadilisha kuwa vipimo halisi katika vitengo vya mwili.
Hatua ya pili ni kuhesabu kuongeza kasi.Kwanza, tunahitaji kusindika data kutoka kwa kasi ili kupata kuongeza kasi ya kitu katika kila mhimili.Baadaye, ili kuhesabu kasi na uhamishaji wa kitu katika kila mhimili, tunahitaji kuunganisha data ya kuongeza kasi.Mbinu za ujumuishaji wa nambari, kama njia ya Euler au njia ya Lunger-Kutta, mara nyingi hutumiwa katika mchakato huu kuhakikisha usahihi wa mahesabu ya kuhamishwa.
Hatua ya tatu ni kuhesabu kasi ya angular.Kutumia data ya gyroscope, kasi ya angular ya kitu katika kila mhimili inaweza kuhesabiwa.Tena, data hii inahitaji kupimwa na kubadilishwa ili kupata kasi ya angular katika vitengo halisi vya mwili.
Hatua ya nne ni kuhesabu mzunguko.Kwa kuunganisha data ya kasi ya angular, pembe ya mzunguko wa kitu katika kila mhimili inaweza kuhesabiwa.Hii inaweza kufanywa kwa kutumia mbinu za ujumuishaji wa nambari kama njia ya Euler au njia ya Kutta ya kuhesabu angle.
Hatua ya tano ni kuunganisha data.Tunachanganya data kutoka kwa kasi na gyroscopes kupata mtazamo kamili na habari ya msimamo wa kitu hicho.Hii inaweza kufanywa kwa kutumia algorithms kama vile solver ya msingi wa quaternion au solver ya Euler.
Hatua ya sita ni kuibua matokeo.Tunabadilisha trajectory ya mwendo wa kitu kilichojumuishwa kuwa seti ya vidokezo katika mfumo wa kuratibu wa 3D na kuionyesha kwa kutumia zana sahihi za taswira kwa uelewaji wa angavu zaidi ya mabadiliko ya mwendo wa kitu na mabadiliko ya mtazamo.
Maswali yanayoulizwa mara kwa mara [FAQ]
1. MPU6050 ni sahihi kiasi gani?
Matokeo yaliyopatikana yalionyesha usahihi wa kutosha wa chini ya 1 % na kuegemea, ikihakikisha upeo sahihi wa shimoni la lifti na viwango vya juu vya tasnia ya kuinua.
2. Jinsi ya kusoma data kutoka MPU6050?
Kusoma rejista za ndani za MPU6050, bwana hutuma hali ya kuanza, ikifuatiwa na anwani ya watumwa ya I2C na kuandika kidogo, na kisha anwani ya usajili ambayo itasomwa.
3. MPU6050 inatumika wapi?
Katika ufuatiliaji wa afya unaoweza kuvaliwa, vifaa vya kufuatilia usawa.Katika drones na quadcopters, MPU6050 hutumiwa kwa udhibiti wa msimamo.Inatumika katika kudhibiti mkono wa robotic.Vifaa vya kudhibiti ishara.
4. Je! MPU6050 ni IMU?
MPU6050 IMU Sensor block inasoma data kutoka sensor ya MPU-6050 ambayo imeunganishwa na vifaa.Kuongeza kasi ya matokeo, kiwango cha angular, na joto kando ya shoka za sensor.
5. Usindikaji wa MPU6050 ni nini?
Hii ndio processor ya onboard ya MPU6050 ambayo inachanganya data inayokuja kutoka kwa kasi na gyroscope.DMP ndio ufunguo wa kutumia MPU6050 na imeelezewa kwa undani baadaye.Kama ilivyo kwa microprocessors zote DMP inahitaji firmware ili iendeshe.
Mtihani wa kazi.Bidhaa za gharama kubwa zaidi na huduma bora ni kujitolea kwetu milele.
Nakala ya moto
- Ni CR2032 na CR2016 inabadilika
- MOSFET: Ufafanuzi, kanuni ya kufanya kazi na uteuzi
- Ufungaji wa relay na upimaji, tafsiri ya michoro za wiring za relay
- CR2016 dhidi ya CR2032 ni tofauti gani
- NPN dhidi ya PNP: Kuna tofauti gani?
- ESP32 vs STM32: Ni microcontroller gani ni bora kwako?
- LM358 Mwongozo wa Uendelezaji wa Uendeshaji wa Dual: Pinouts, michoro za mzunguko, sawa, mifano muhimu
- CR2032 vs DL2032 vs CR2025 Mwongozo wa kulinganisha
- Kuelewa tofauti za ESP32 na ESP32-S3 Uchambuzi wa Ufundi na Utendaji
- Uchambuzi wa kina wa mzunguko wa safu ya RC
 Kuchunguza uwezo na matumizi ya chip ya mawasiliano ya NRF24L01
Kuchunguza uwezo na matumizi ya chip ya mawasiliano ya NRF24L01
2024-04-25
 MMBT3904 NPN Transistor: Maelezo yake, Mwongozo wa Maombi kamili, na MMBT3904 dhidi ya MMBT5551
MMBT3904 NPN Transistor: Maelezo yake, Mwongozo wa Maombi kamili, na MMBT3904 dhidi ya MMBT5551
2024-04-25
Nambari ya sehemu ya moto
 CL21B225KPFNNNE
CL21B225KPFNNNE C2012X7R2A332K085AM
C2012X7R2A332K085AM CGA5L2X7R2A474K160AE
CGA5L2X7R2A474K160AE EMK212AB7225MD-T
EMK212AB7225MD-T CLLE1AX7R0J684M050AC
CLLE1AX7R0J684M050AC GRM1555C2A2R9CA01D
GRM1555C2A2R9CA01D AMK107BBJ226MA-T
AMK107BBJ226MA-T LD025A5R0CAB2A
LD025A5R0CAB2A 12063A153FAT2A
12063A153FAT2A TPSB336K016R0500
TPSB336K016R0500
- TAJV107M020RNJ
- HV2733FG-G
- AT91SAM7XC256B-AU
- AT90CAN128-15AZ
- ICL3222CB
- GS1671AIBE3
- IS42S32800J-6BLI
- RT0402DRD07137RL
- 2MBI400S-120-50
- V24A12C400AN
- VI-911265
- IS43DR16640C-25DBLI-TR
- ADS8344EB/2K5G4
- XC5VFX130T-1FFG1738I
- TLV1504ID
- STM706DS6F
- XC3S500E-5FTG256C
- LM5113QDPRRQ1
- BMS3004-1E
- DAC8544IPFB
- AM27C512-70DC
- AR7242-AH1A
- AT49BV1604T
- HD6433834C22E
- LTC3407EMSE
- M36W0R5040UOZB5U
- MT6516A/B
- N74F374DB
- PMB6810V1.83
- PS16256-TC36
- S29JL064H90TAI00
- NT78326SZFG-AB
- R2J24010F-020
- HN62434FAE33
- HPMX-4001
- AT91SAM7X128
- 31499-10
- CR300
- P5DF081HNT1AD2060